

















在精密测量领域,高反光、透明及液态物体的表面形貌检测始终是技术难点。传统激光三角测量法因原理限制,在面对镜面反射、透明介质或大倾斜角表面时,常出现信号丢失、数据失真等问题;而点光谱共焦传感器凭借其独特的共焦光学结构与光谱分析技术,成为突破这些场景的“终极解决方案”。

一、技术原理对比:共焦结构 vs 三角定位
激光三角测量法基于几何光学原理,通过激光束照射被测物表面,反射光经透镜成像于位置传感器(如CMOS/CCD),根据三角关系计算距离。其核心依赖“入射角-反射角”的固定几何关系,当表面倾斜角超过阈值(通常±45°以内)或材质为镜面/透明时,反射光可能无法进入接收器,导致测量盲区。例如,测量手机玻璃盖板的曲面边缘时,激光三角法常因入射角过大而失效。
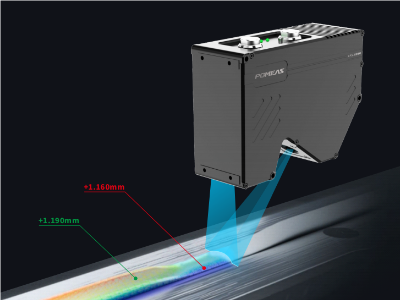
点光谱共焦传感器则采用共焦光学设计:一束宽光谱复色光经色散镜头分解为单色光,在量程范围内形成连续波长对应的焦点序列。当测量光照射到物体表面时,仅与表面高度匹配的波长光会聚焦并反射回光谱仪,通过波长-距离标定曲线直接换算高度值。这一原理使其对入射角不敏感,即使表面倾斜角达±88°(漫反射表面)或±62°(镜面表面),仍能通过同轴光路捕获反射光,实现无盲区测量。
二、核心优势:穿透透明介质与抗环境干扰
1. 透明/液态物体测量:突破激光三角法的“不可见”局限
激光三角法依赖反射光强度,而透明物体(如玻璃、液体)会直接透射激光,导致接收器无信号;即使部分反射,多层界面(如镀膜玻璃)的反射光叠加也会引发信号混淆。例如,测量液晶面板的玻璃基板厚度时,激光三角法需分别测量上下表面,但因光路穿透性差,难以同步捕获双界面数据。
光谱共焦传感器则通过“穿透-反射”机制实现透明物体测量:测量光穿透第一层表面后,在第二层表面反射,光谱仪通过分析两次反射光的波长差,直接计算层间厚度。例如,普密斯SFS-8022可测量0.1mm厚的光学镜片,精度达±0.1μm。
2. 高反光表面测量:消除镜面反射的“信号过载”问题
激光三角法在测量高光金属(如铝合金、不锈钢)时,镜面反射会导致接收器饱和,形成“光斑溢出”现象,使测量值偏离真实高度。例如,测量发动机缸体的曲轴孔内壁时,激光三角法常因反射光过强而无法稳定输出数据。
光谱共焦传感器通过共焦光路设计,仅接收与焦点匹配的单色光,即使表面反射率高达99%(如镀铬表面),也能通过光谱仪的窄带滤波功能滤除杂散光,确保信号稳定性。
3. 抗环境干扰:稳定输出与温度漂移控制
激光三角法对环境光敏感,强光(如阳光)会干扰接收器信号;同时,激光源功率波动或温度变化(如工业现场高温环境)会导致测量值漂移。例如,在户外测量太阳能电池板表面形貌时,激光三角法需额外加装遮光罩,且需频繁校准。
光谱共焦传感器采用封闭式光路设计,光谱仪仅分析特定波长光,环境光(如550nm波段外的可见光)被自动滤除;其光学镜头无电子元件,温漂系数低于0.01μm/℃,可长期稳定运行。
三、典型应用场景:从消费电子到精密制造
-
消费电子:测量手机玻璃盖板的曲率半径、摄像头模组的段差(如镜片与支架的间隙)、屏幕OCA胶层厚度等。光谱共焦传感器可同步输出3D点云数据,实现“一次扫描,全维度检测”,而激光三角法需多次调整角度才能覆盖曲面。
-
半导体制造:测量晶圆表面粗糙度(Ra<0.5nm)、芯片封胶厚度(通常50-200μm)、锡球引线焊接高度等。光谱共焦传感器的纳米级分辨率(如海伯森HPS-CFL1000达0.1nm)可满足先进制程需求,而激光三角法因分辨率限制(通常≥1μm)无法应用。
-
汽车制造:检测发动机缸体曲轴孔内壁的圆柱度、电池包壳体的平面度(如铝壳焊接缝的平整度)、车灯透镜的曲率半径等。光谱共焦传感器可穿透透明灯罩直接测量内部反射镜形貌,而激光三角法需拆解灯罩才能检测。
-
医疗领域:测量医用薄膜的厚度(如输液袋膜厚50-200μm)、人工关节的表面粗糙度(Ra<0.1μm)、内窥镜镜片的曲率半径等。光谱共焦传感器的非接触式测量可避免污染生物样本,而激光三角法可能因接触划伤表面。
激光三角测量法在平面、漫反射表面的测量中仍具成本优势(如简单位移检测),但面对高反光、透明或复杂曲面时,其原理性缺陷导致无法稳定输出数据。光谱共焦传感器通过共焦光学结构、光谱分析技术与抗干扰设计,实现了对入射角、材质、环境光的“全免疫”,成为精密制造、半导体、消费电子等领域的首选方案。
产品推荐
技术方案
MORE+您可能也对以下信息感兴趣

 咨询POMEAS
咨询POMEAS  价格垂询
价格垂询  申请演示/测试
申请演示/测试  免费试用
免费试用  精准选型
精准选型  电话:400-168-8336
电话:400-168-8336 传真:+ 86-0769-22660867
传真:+ 86-0769-22660867 邮箱:marketing@pomeas.com
邮箱:marketing@pomeas.com 公司地址
公司地址
生产中心:广东省东莞市东城区柏洲边社区涌尾路68号
营销中心:东莞市松山湖高新区中集智谷产业园15栋
苏州办事处:苏州市工业园区唯新路60号启迪时尚科技城40栋

微信二维码